







No products in the cart.

Dual VNH2SP30 Motor Driver Carrier MD03A
"
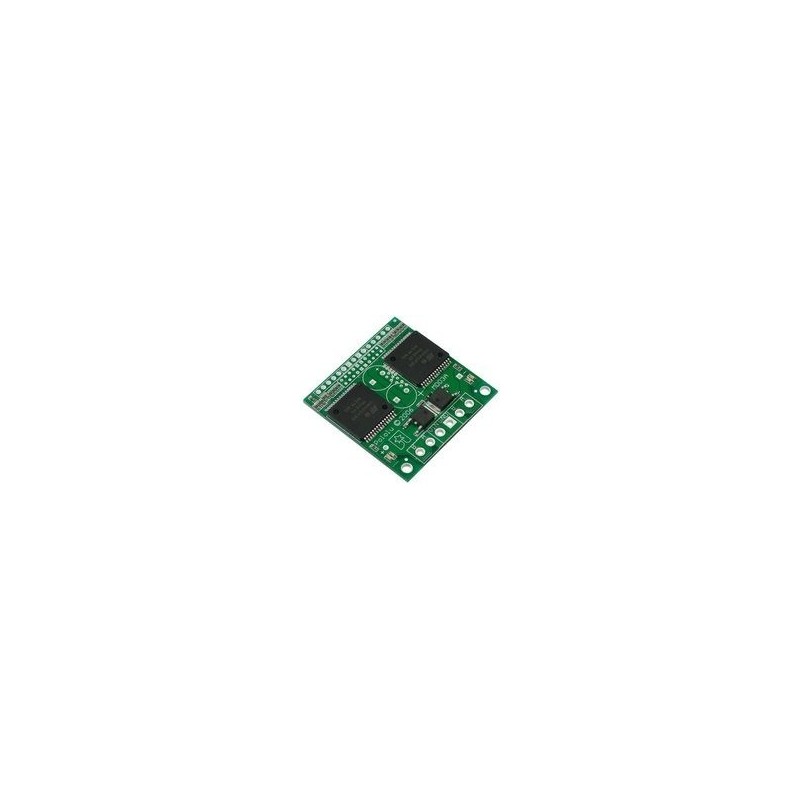
The Pololu dual high-power motor drivers are compact carriers for the VNH3SP30 and VNH2SP30 motor driver integrated circuits from ST. The board incorporates most of the components of the typical application diagram on page 8 of the VNH2SP30 datasheet, including pull-up and current-limiting resistors and a FET for reverse battery protection. (The current sense circuit might not be populated on the VNH3SP30 version of the board since only the VNH2SP30 supports current sense.) To keep the number of I/O lines down, the two enable/diagnostic lines on each chip are tied together. All you need to add is a microcontroller or other control circuit to turn the H-Bridges on and off.
Please note that we offer several other products based on these same chips, including single carrier boards for controlling one motor, the qik 2s12v10 dual serial motor controller, the TReX motor controller, the jrk 12v12 USB motor controller with feedback, and the Orangutan X2 robot controller. We also have a family of higher-power motor drivers that can deliver more current over a wider operating voltage range.
In a typical application, the power connections are made on one end of the board, and the control connections are made on the other end. +5 volts must be supplied to the board through the smaller 0.1""-spaced pins; the input voltage is available at those pins as well, but the connection is not intended for currents exceeding a few amps. The diagnostic pins can be left disconnected if you do not want to monitor the fault conditions of the motor drivers. INA and INB control the direction of each motor, and the PWM pins turns the motors on or off. For the VNH2SP30 version, the current sense (CS) pins will output approximately 0.13 volts per amp of output current. If you want to add current sensing to the VNH3SP30 version, or if you want higher-accuracy current sensing with the VNH2SP30 version, please consider our ±30A ACS714 current sensor carrier.
The dual motor driver PCB includes provisions for installing up to three large capacitors to limit disturbances on the main power line. Two 10mm radial capacitors may be mounted between the motor driver ICs, and an axial capacitor may be mounted between the ICs and power connections. It is generally not necessary to use all three capacitors; two radial capacitors are included with each unit. For applications that require a low profile, a single capacitor can be installed on its side as shown in the picture to the right.
Note: A 0.1? breakaway male header strip, three 2-pin terminal blocks, and two electrolytic capacitors are included but not soldered onto the boards. No printed documentation is shipped with these items; please see the VNH3SP30 and VNH2SP30 datasheets linked under the Resources tab.
| VNH3SP30 | VNH2SP30 | |
|---|---|---|
| Operating supply voltage (Vcc) | 5.5 – 36 V* | 5.5 – 16 V |
| Maximum current rating | 30 A | 30 A |
| MOSFET on-resistance (per leg) | 34 m? | 19 m? |
| Maximum PWM frequency | 10 kHz | 20 kHz |
| Current sense | none | approximately 0.13 V/A |
| Over-voltage shutoff | 36 V* | 16 V minimum (19 V typical) |
| Time to overheat at 20 A** | 8 seconds | 35 seconds |
| Time to overheat at 15 A** | 30 seconds | 150 seconds |
| Current for infinite run time** | 9 A | 14 A |
*Manufacturer specification. In our experience, shoot-through currents make PWM operation impractical above 16 V.
**Typical results using Pololu motor driver carrier with 100% duty cycle at room temperature.
The motor drivers have maximum current ratings of 30 A continuous. However, the chips by themselves will overheat at lower currents (see table above for typical values). The actual current you can deliver will depend on how well you can keep the motor drivers cool. The carrier printed circuit board is designed to draw heat out of the motor driver chips, but performance can be improved by adding a heat sink. In our tests, we were able to deliver short durations (on the order of milliseconds) of 30 A and several seconds of 20 A without overheating. At 6 A, the chip gets just barely noticeably warm to the touch. For high-current installations, the motor and power supply wires should also be soldered directly instead of going through the supplied terminal blocks, which are rated for up to 15 A.
This product can get hot enough to burn you long before the chip overheats. Take care when handling this product and other components connected to it.
Many motor controllers or speed controllers can have peak current ratings that are substantially higher than the continuous current rating; this is not the case with these motor drivers, which have a 30 A continuous rating and over-current protection that can kick in as low as 30 A (45 A typical). Therefore, the stall current of your motor should not be more than 30 A. (Even if you expect to run at a much lower average current, the motor can still draw high currents when it is starting or if you use low duty cycle PWM to keep the average current down.)
| Schematic of the Pololu Dual High Current Motor Driver Carrier |
|---|
"

Dual VNH2SP30 Motor Driver Carrier MD03A