








No products in the cart.

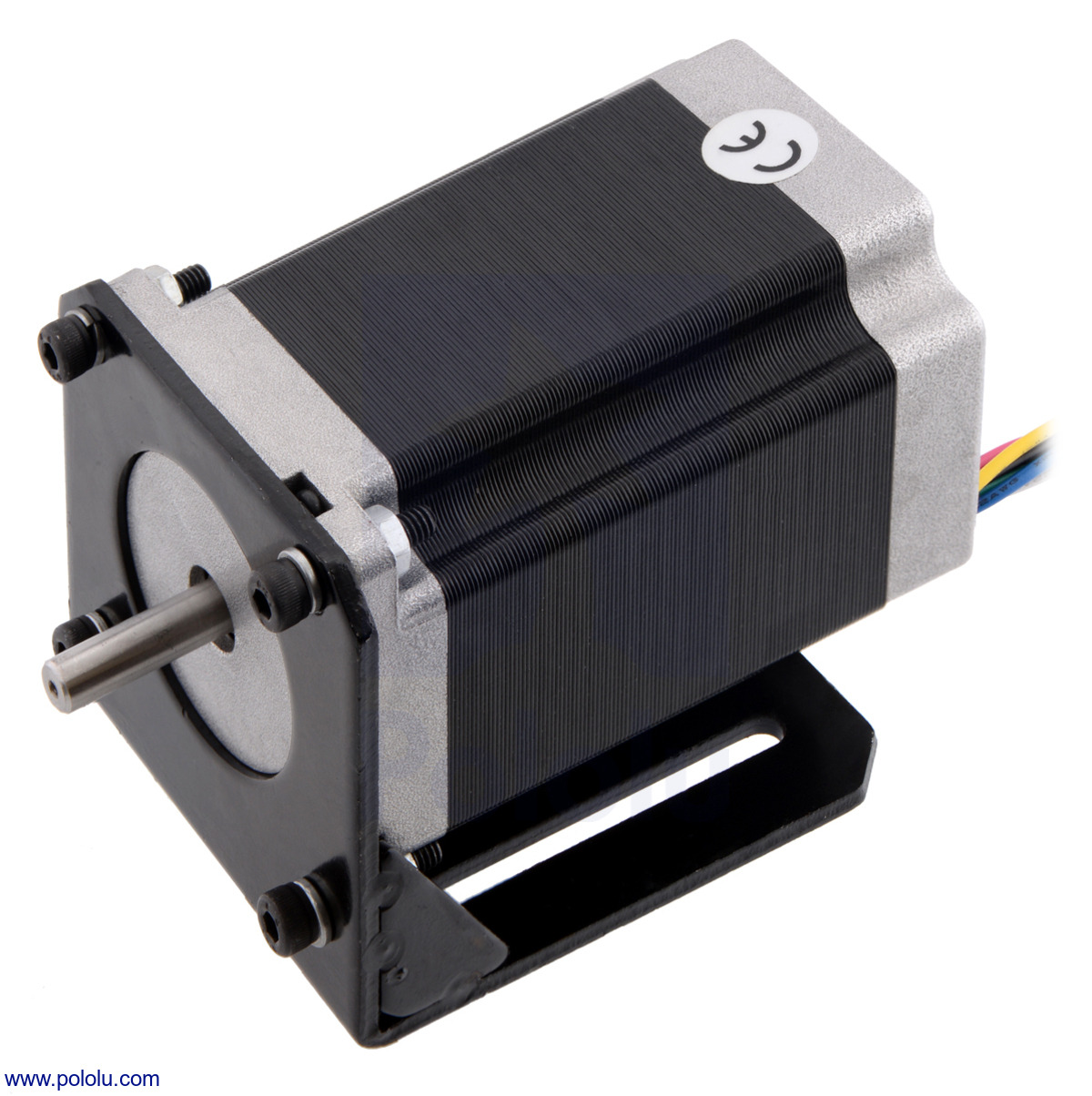
Stepper Motor: Unipolar/Bipolar, 200 Steps/Rev, 57×56mm, 3.6V, 2 A/Phase
This high-torque hybrid stepping motor has a 1.8° step angle (200 steps/revolution). Each phase draws 2 A at 3.6 V, allowing for a holding torque of 9 kg-cm (125 oz-in). The motor has six color-coded wires terminated with bare leads that allow it to be controlled by both unipolar and bipolar stepper motor drivers. When used with a unipolar stepper motor driver, all six leads are used. When used with a bipolar stepper motor driver, the center-tap yellow and white wires can be left disconnected (the red-blue pair gives access to one coil and the black-green pair gives access to the other coil). We recommend using it as a bipolar stepper motor.
 |
|
NEMA 23 stepper motor (item #1475) mounted with a steel L-bracket for NEMA 23 stepper motors. |
|---|
Our 1/4? universal mounting hub and 1/4? scooter wheel adapter can be used to mount objects on the stepper motor’s 1/4?-diameter output shaft, and we carry a NEMA 23 steel bracket for securely mounting this stepper motor to a flat surface (the picture above shows this bracket being used with a taller NEMA 23 stepper motor).
More specifications are available in the datasheet (49k pdf).
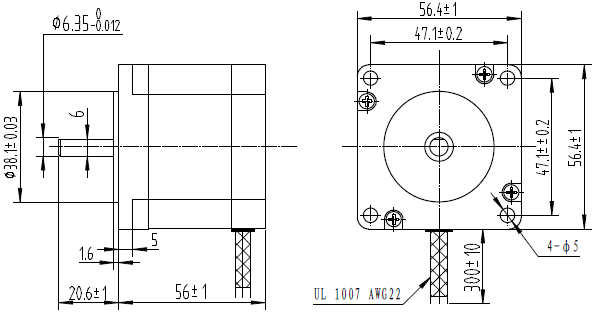
The following diagram shows the stepper motor dimensions in mm. The output D-shaft has a 0.25? (6.35 mm) diameter with a section that is flattened by 0.5 mm (note: the diagram below incorrectly lists this flattened width as 6 mm when it is really 5.85 mm). This shaft works with our 1/4? universal mounting hub and 1/4? scooter wheel adapter.
 |
 |
|
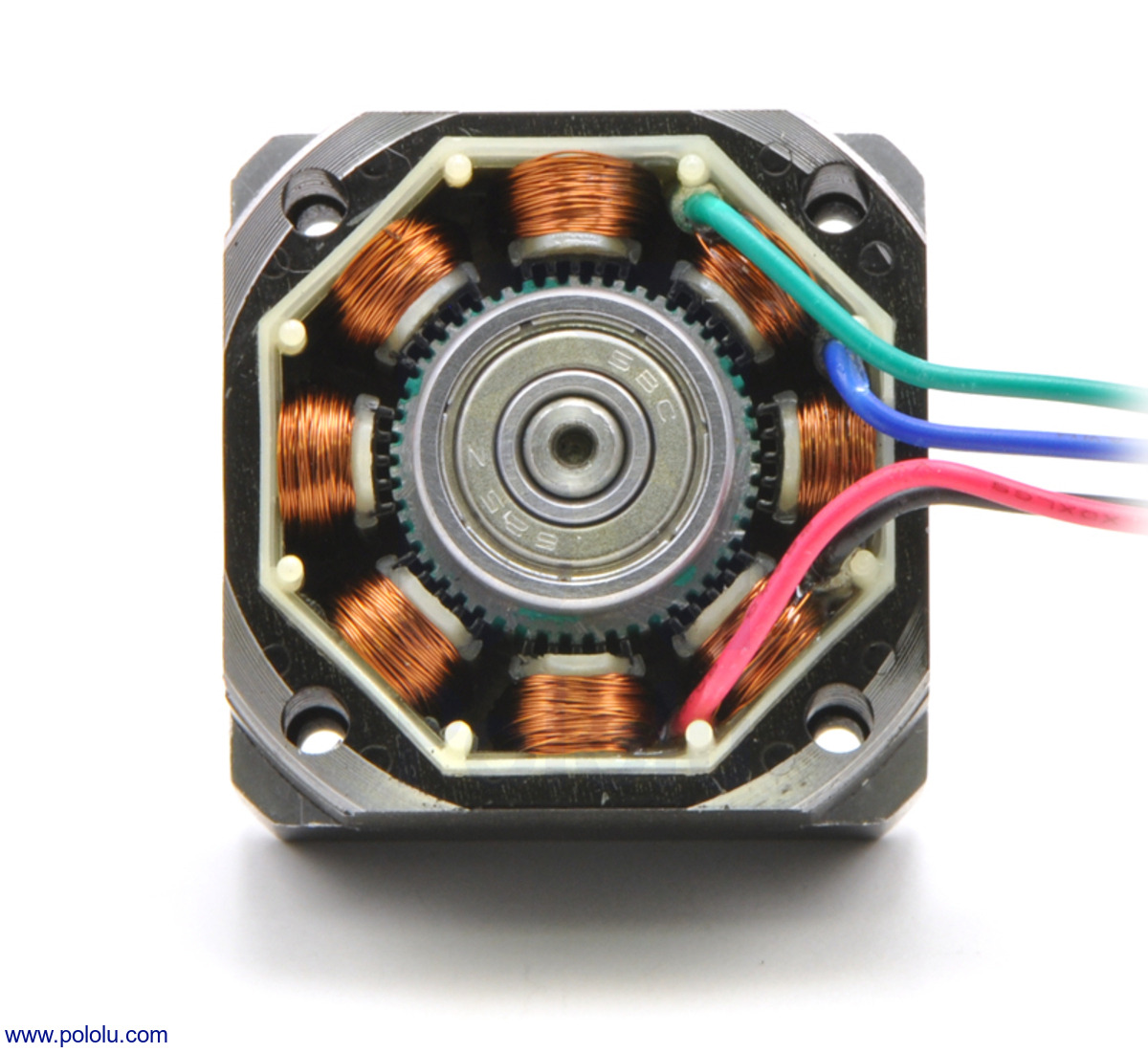
The inside of a bipolar stepper motor. |
|---|
Stepper motors are generally used in a variety of applications where precise position control is desirable and the cost or complexity of a feedback control system is unwarranted. Here are a few applications where stepper motors are often found:
| Size: | 56.4 mm square × 56 mm1 |
|---|---|
| NEMA size: | 23 |
| Weight: | 700 g |
| Shaft diameter: | 6.35 mm |
| Shaft type: | 1/4 inch "D" |
|---|---|
| Steps per revolution: | 200 |
| Current rating: | 2000 mA2 |
| Voltage rating: | 3.6 V |
| Holding torque: | 125 oz·in |
| Resistance: | 1.8 Ohm2 |
| Inductance per phase: | 2.5 mH |
| Number of leads: | 6 |
| Lead length: | 30 cm |

Stepper Motor: Unipolar/Bipolar, 200 Steps/Rev, 57×56mm, 3.6V, 2 A/Phase