











No products in the cart.



12.0V / 7.10Nm / 70.00rpm / Coreless(Maxon) / TTL
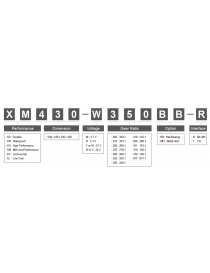
DYNAMIXEL is a robot exclusive smart actuator with fully integrated DC Motor + Controller + Driver + Sensor + Reduction Gear + Network in one DC servo module.
The DYNAMIXEL-XH / XM Series offers a variety of control techniques based on high-performance current sensing algorithms.
It adopts the aluminum case and adopts the new technology such as the hollow cable fastening structure for users’ convenience.
1. 6 Operating Modes
(Torque Control, Velocity Control, Position Control, Extended Position Control, Current based Position Control, PWM Control)
2. Profile Control for Smooth Motion Planning
3. Improved Heat Sink Featuring an Aluminum Case
4. Hollow Back Case Minimizes Cable Stress (3-way-routing)
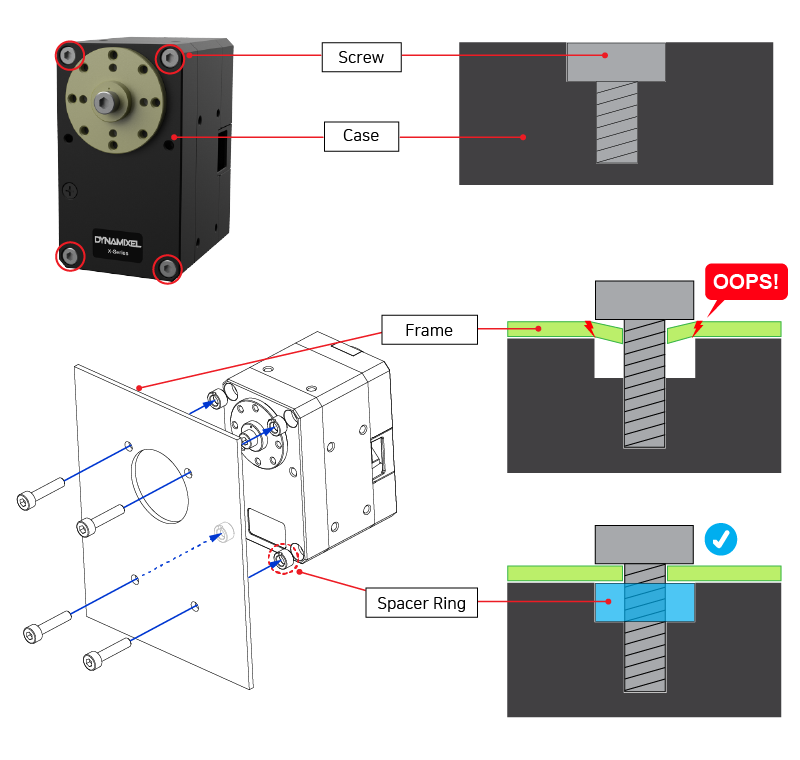
5. Easy and Simple Assembly Structure
6. Energy Saving (Reduced Current from 100mA to 40mA)
7. 28.4% reduced volume compared to the MX-106
8. Support synchronous control mode
9. Support external I / O port support
| Item | Quantity | Description |
|---|---|---|
| XH540-W150-T | 1 | DYNAMIXEL |
| HN13-N101 | 1 | Standard horn for X540 models |
| Thrust Washer (for Horn Assembly) | 1 | Preventing friction between horn and case |
| Robot Cable-X3P 180mm | 1 | TTL 3p Cable(JST-JST) |
| Robot Cable-X3P(Convertible) 180mm | 1 | TTL 3p Cable(MOLEX-JST) |
| Robot Cable-3P-Sync 160mm | 1 | Cable for Dual Joints |
|
Wrench Bolt WB M2.5x5 |
16 | For frame assembly(Side hole) |
| Wrench Bolt WB M2.5x4 | 10 | For horn & frame assembly |
| Wrench Bolt WB M3x8 | 1 | For horn assembly |
| Spacer Ring | 8 | For frame assembly |


DYNAMIXEL-X Series cable assembly through hollow case
Organize the entangled cable before assembling the back case.
Do not assemble the back case with entangled cable. The entangled cable can be squashed by the case and cause communication error.
If you use two cables through the hollow case, the cables will be damaged.
Use only one cable through the hollow case.
The DYNAMIXEL-X Series adopted a new gold-plated JST connector for secure and reliable communication.
The connector used for previous Dynamixel is Molex.
To control DYNAMIXEL-X Series actuators via OpenCM or USB2Dynamixel, please use the JST-Molex Convertible Cable enclosed in the package.
However, the Molex-JST convertible cable is NOT included in the XL430 model.
Please purchase a convertible cable when using a controller and interface that supports the JST connector.

| Model Name | XH540-W150-T | |
|---|---|---|
| Series | DYNAMIXEL X | |
| MCU | ARM Cortex-M3 (72 [Mhz], 32 [bit]) | |
| Input Voltage | Min. [V] | 10.0 |
| Recommended [V] | 12.0 | |
| Max. [V] | 14.8 | |
| Performance Characteristics | Voltage [V] | 12.0 |
| Stall Torque [N·m] | 7.10 | |
| Stall Current [A] | 4.9 | |
| No Load Speed [rpm] | 70.0 | |
| No Load Current [A] | 0.07 | |
| Continuous Operation | Voltage [V] | - |
| Torque [N·m] | - | |
| Speed [rpm] | - | |
| Current [A] | - | |
| Resolution | Resolution [deg/pulse] | 0.0879000000 |
| Step [pulse/rev] | 4,096 | |
| Angle [degree] | 360 | |
| Position Sensor | Contactless absolute encoder (12 [bit], 360 [deg]) Maker : ams(www.ams.com), Part No : AS5045 |
|
| Operating Temperature | Min. [°C] | -5 |
| Max. [°C] | 80 | |
| Motor | Coreless (Maxon) | |
| Baud Rate | Min. [bps] | 9,600 |
| Max. [bps] | 4,500,000 | |
| Control Algorithm | PID | |
| Gear Type | Spur | |
| Gear Material | Metal | |
| Case Material | Metal(Front, Middle) Engineering Plastic(Back) | |
| Dimensions (WⅹHⅹD) [mm] | 33.5 x 58.5 x 44 | |
| Dimensions (WⅹHⅹD) [inch] | 1.32 x 2.30 x 1.73 | |
| Weight [g] | 165.00 | |
| Weight [oz] | 5.82 | |
| Gear Ratio | 272.5 : 1 | |
| Backlash [arcmin] | - | |
| Backlash [deg] | - | |
| Command Signal | Digital Packet | |
| Protocol Type | Half duplex Asynchronous Serial Communication (8bit, 1stop, No Parity) | |
| Link (Physical) | TTL Level Multidrop Bus | |
| ID | 0 ~ 252 | |
| Feedback | Position, Velocity, Current, Realtime tick, Trajectory, Temperature, Voltage, External Port, etc. | |
| Protocol version | Protocol 1.0 Protocol 2.0(Default) |
|
| Operating Mode / Angle | Current Control mode:Endless turn Velocity Control mode:Endless turn Position Control Mode:360 [deg] Extended Position Control Mode:±256 [rev] Current-based Position Control Mode:±256 [rev] PWM Control Mode:Endless turn |
|
| Output [W] | - | |
| Standby Current [mA] | 40 | |

12.0V / 7.10Nm / 70.00rpm / Coreless(Maxon) / TTL
